Store constants and arrays in program memory
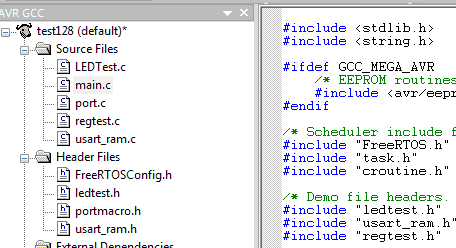
In many cases, our embedded projects have to deal with various constants or arrays that aren’t changed during program execution. So why put them in RAM if we can store constant data in flash memory and leave RAM untouched. RAM is precious in micro-controllers, so leave it for stack and heaps. For instance, you are using an LCD in your project and want to send “Hello World” to it, you simply grab one of common LCD libraries and use commands like: By using this innocent action we end up in storing this string in flash memory during compilation and loading it to RAM during program start-up routines in the microcontroller. When LCDstring() command is executed string is read from SRAM not from FLASH. So we end up with two copies of same string (flash and SRAM), and worse – we occupy SRAM with constants. AVR flash memory locations can be read by the program, so this feature can be used to read constants directly from flash without loading them to RAM. Before doing this we need to use one special…