Using watchdog timer in your projects
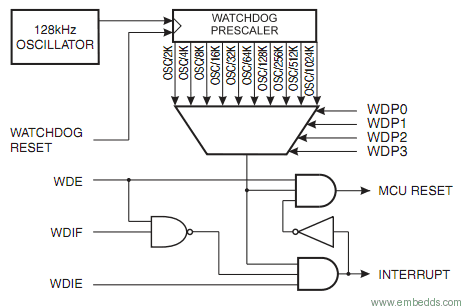
All AVR microcontrollers have an internal watchdog timer that can be successfully used in your projects. Atmega328 and other modern AVR microcontrollers have the so-called Enhanced Watchdog Timer (WDT). It has few beneficial features, including a separate 128kHz clock source, reset the microcontroller, and generates an interrupt. The watchdog timer is nothing more than a simple counter that gives a pulse when it counts up from the hardware perspective. This pulse can either generate an interrupt or reset MCU (or do both). The watchdog timer can be reset to zero at any time with simple WDR command, and this is where the fun begins. If you enabled the watchdog timer, you have to take care and reset it before it fills up and resets MCU. Otherwise, if your program hangs or sticks in some infinite loop without a reset, watchdog counts up and resets the system. In this case, we get a pretty good program guardian who keeps an eye on program flow. In other special cases, the watchdog can serve as a simple software-based MCU reset source.