Introducing to STM32 ADC programming. Part1
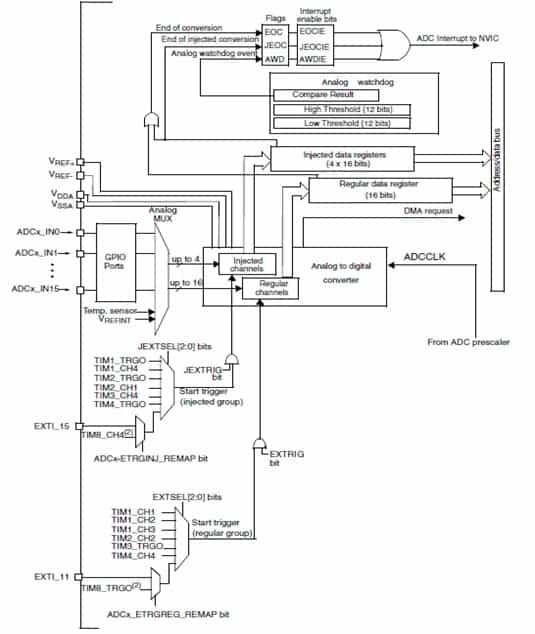
STM32 ADC is a pretty complex peripheral. It is designed to be flexible enough to accomplish complex tasks. We will dedicate a few posts where we will try to cover the main features and give working examples of code. The block schematic may look scary the first time, but it can be split into several pieces that are responsible for different functions if you look closer. Will will go through them step by step to make it look brighter.

